广告
锡林郭勒盟步进电机厂家


1/2
- 面议
- 2021-02-04 05:09:24
- 步进电机
- 常州市海克拉尔电气有限公司

- 新浪微博


- QQ空间


- 豆瓣网


- 百度新首页

取消
信息介绍
详细参数
步进电动机又称脉冲电动机,基于基本的电磁铁原理,它是一种可以自由回转的电磁铁,其动作原理是依靠气隙磁导的变化来产生电磁转矩。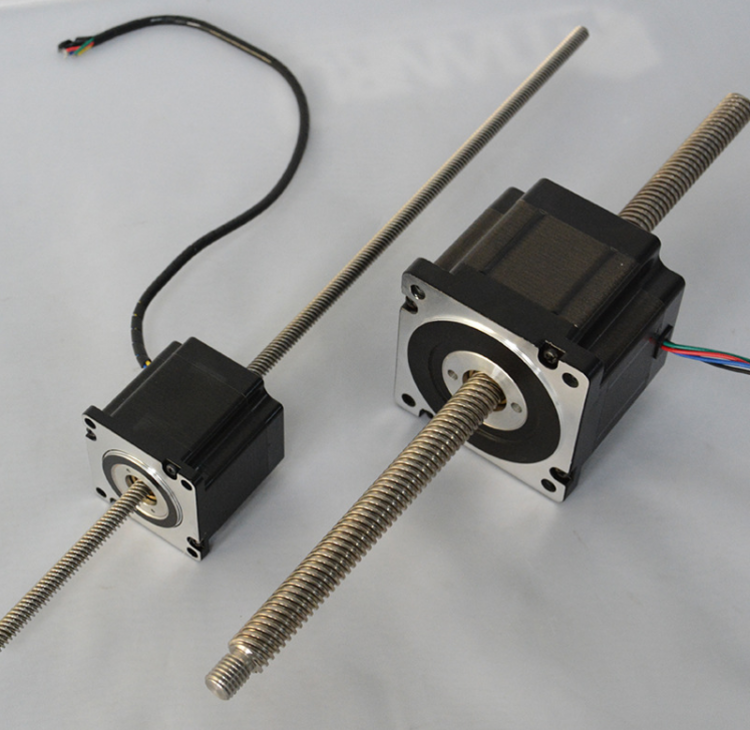
二十世纪五十年代后期晶体管的发明也逐渐应用在步进电机上,对于数字化的控制变得更为容易。到了八十年代后,由于廉价的微型计算机以多功能的姿态出现,步进电机的控制方式更加灵活多样化
步进电机的角位移量与输入的脉冲个数严格成正比,而且在时间上与脉冲同步。因而只要控制脉冲的数量、频率和电机绕组的相序,即可获得所需的转角、速度和方向等
步进电动机的结构形式和分类方法较多,一般按励磁方式分为磁阻式、永磁式和混磁式三种;按相数可分为单相、两相、三相和多相等形式。
步进电机中以反应式步进电机为主。步进电机的运行性能与控制方式有密切的关系,步进电机控制系统从其控制方式来看,可以分为以下三类:开环控制系统、闭环控制系统、半闭环控制系统。半闭环控制系统在实际应用中一般归类于开环或闭环系统中。
主要应用在工业、航天、机器人、精密测量等领域,如跟踪卫星用光电经纬仪、仪器、通讯和雷达等设备,细分驱动技术的广泛应用,使得电机的相数不受步距角的限制,为产品设计带来了方便。目前在步进电机的细分驱动技术上,采用斩波恒流驱动,仪脉冲宽度调制驱动、电流矢量恒幅均匀旋转驱动控制止,大大提高步进电机运行运转精度,使步进电机在中、小功率应用领域向高速且精密化的方向发展。
- 海克拉尔
- 步进电机
- 步进电机
- 王宇
常州市海克拉尔电气有限公司为你提供的“锡林郭勒盟步进电机厂家”详细介绍
步进电机厂家信息
-
 舟山中盛科建佐帝亚轻钢龙骨招商¥ 1000
舟山中盛科建佐帝亚轻钢龙骨招商¥ 1000 -
 高新区开锁换锁芯性能可靠面议
高新区开锁换锁芯性能可靠面议 -
 翻板卸车机-60吨卸车平台定制面议
翻板卸车机-60吨卸车平台定制面议 -
 淮安泡沫罐供应厂家面议
淮安泡沫罐供应厂家面议 -
 苏州电子电器出口检测信誉保证¥ 1
苏州电子电器出口检测信誉保证¥ 1 -
 芝罘区开锁换锁芯安全可靠面议
芝罘区开锁换锁芯安全可靠面议









